|
Это - СК, подвижные относительно МКС – СК КМР/ПГ:
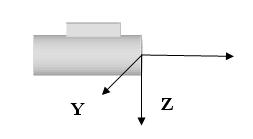
- СК TIP ЕЕ, начало этой системы координат расположено в центре плоскости интерфейса EE, 
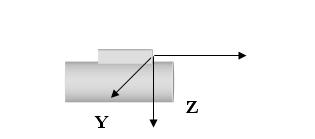
- СК телевизионной камеры, размещенной на ЕЕ; начало этой системы координат расположено в центре объектива камеры,
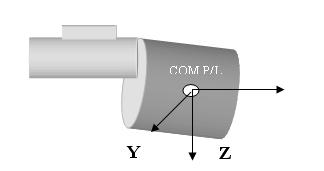
- СК, связанная с центром масс (COM) перемещаемого ПГ,
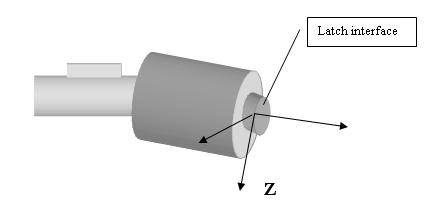
- СК интерфейса замка такелажного элемента (ТЭ) ПГ.
|